LABEL (LABoratory for parallEL robotics)
9 septiembre 2013
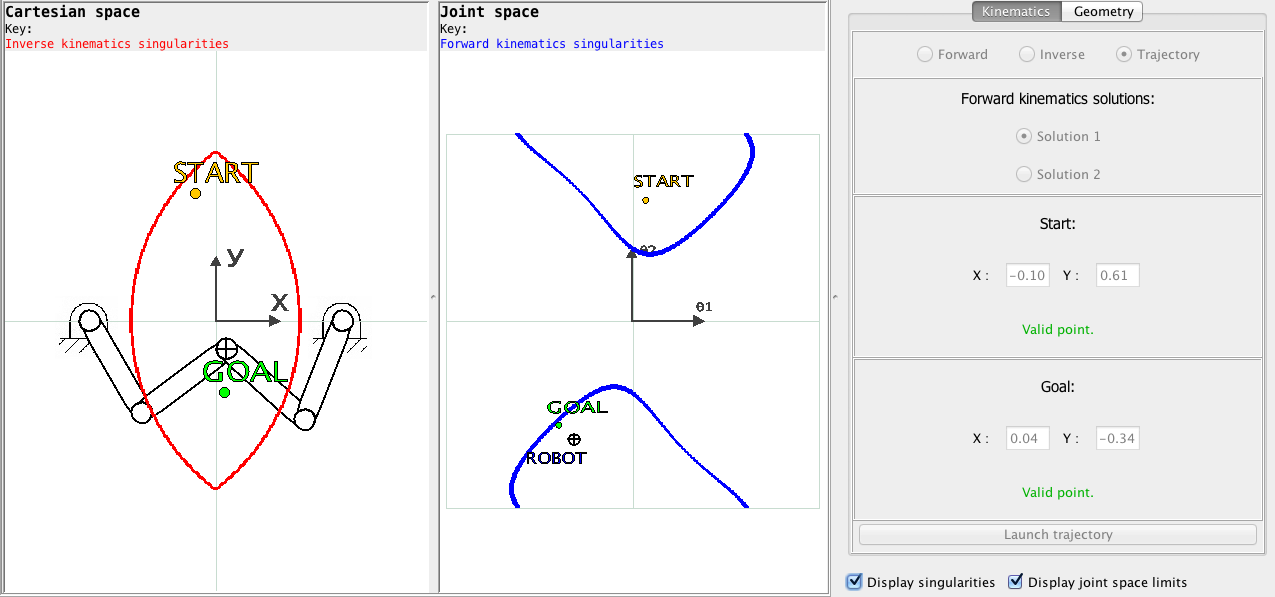
LABEL es una aplicación basada en java que permite la simulación de la cinemática de robots paralelos clásicos. Está basada en EJS (Easy Java Simulations) y permite:
- Analizar las soluciones directa e inversa de la cinemática de los mecanismos clásicos 5R, 3RRR y Delta.
- Estudiar las singularidades y el espacio de trabajo de estructuras paralelas clásicas.
- Planificación de trayectorias.
- Una representación gráfica realista de los robots simulados.
Ve a: http://arvc.umh.es/label
Instrucciones:
Descarga el .jar y simúlalos: